戦車型ロボットを開発しています(@_@)
ここのところ何かと話題にしていますが、今、戦車型のロボットを開発中です(*´ω`*)
(開発と言えるほど高度なものなのかどうかは微妙なところですがw)
今日は、今、開発している戦車型のロボットについて記事を書きたいと思います。
目次
スポンサーリンク
概要
まだ開発途中ですが、こんな感じです。
本体部
@開発中の戦車型ロボット
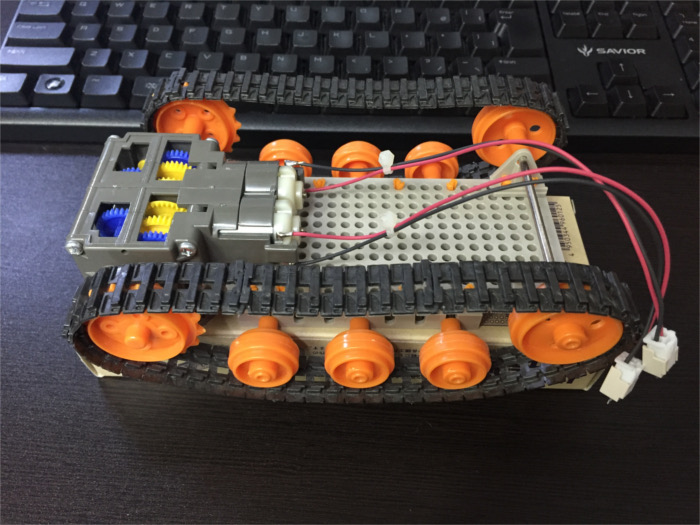
上の画像が本体部で、既に完成しています。ここにマイコンとモータコントローラを搭載すれば動くようになります。
ちなみに、キャタピラやギアボックスなどは、すべてタミヤ製品です。
コネクタは自分で圧着しました。初めて圧着したんですが、難しい作業ですね(。´・ω・)
マイコン・モータコントローラ部
@マイコン・モータコントローラ部
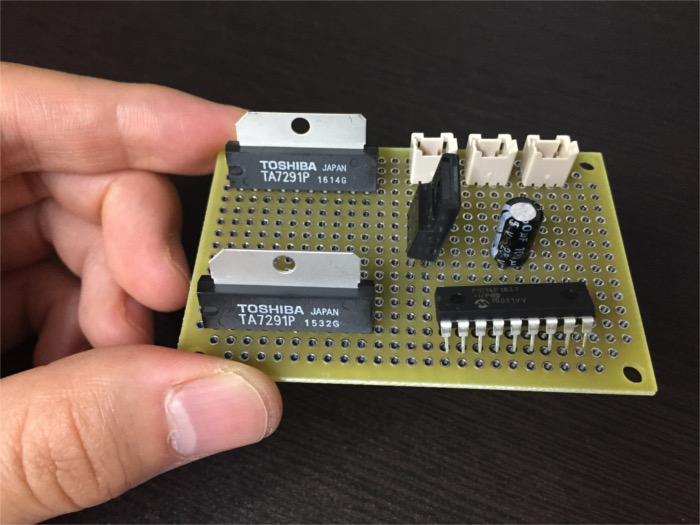
マイコン・モータコントローラ部は未完成ですが、こんな感じでハンダ付けしようと思っています。
マイコンはPICマイコン(16F1827)、モータコントローラはTA7291Pを使用しています。
モータは、PICマイコンからのPWM信号 → TA7291Pでコントロール → モータへ出力、というプロセスで動作します。
右上の3つのメスコネクタは「回路への電源供給」、「モータ出力 × 2」です。
目標
目標は、とりあえず3つです。
動くようにする
動くようにします!(当たり前ですがw)
真っ直ぐ走れるようにします。
ただし、同じ電圧を左右のモータに供給するだけの単純な仕組みなので、正確に真っ直ぐ走れるかどうかは微妙です・・・。
改善策としては、フィードバック制御を行ってモータの回転数を制御する方法などがありますが、そこまで面倒なことをしようとは思っていません。
段差から落ちないようにする
お掃除ロボットのルンバみたいに、段差から落ちないようにしたいですね。
これはどういう仕組みなんでしょうか?調べていないので詳しくは知りません。
恐らく、床との距離を赤外線センサで測っているのではないでしょうか。
あとで調べてみます。
壁に衝突しないようにする
これも、ルンバのパクリですねw
壁に衝突しそうになったら、避けるようにしたいと思っています。
これを実現するための仕組みは単純で、超音波センサか赤外線センサで前方の距離を測れば可能です。
そして、両方とも既に持っています。
@左が超音波センサで右が赤外線センサ
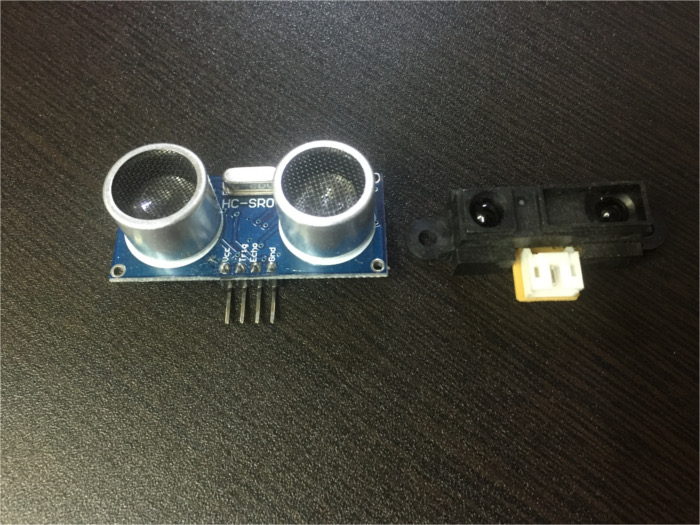
どちらを採用するかはメリット・デメリットを調べてから決めようと思います。
以上です!
ノシ

スポンサーリンク
関連記事